

OpenCV学习笔记(5)——图像梯度
- 蒙面西红柿
- 2,624
1.sobel算子的理论基础
索贝尔算子(Sobel operator)主要用作边缘检测,在技术上,它是一离散性差分算子,用来运算图像亮度函数的灰度之近似值。
Sobel卷积因子
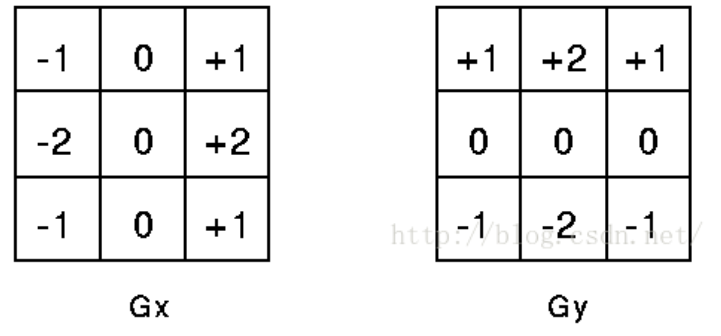
该算子包含两组3×3的矩阵,分别为横向及纵向,将之与图像作平面卷积,即可分别得出横向及纵向的亮度差分近似值。如果以A代表原始图像,Gx及Gy分别代表经横向及纵向边缘检测的图像灰度值。
从右往左,从上往下:
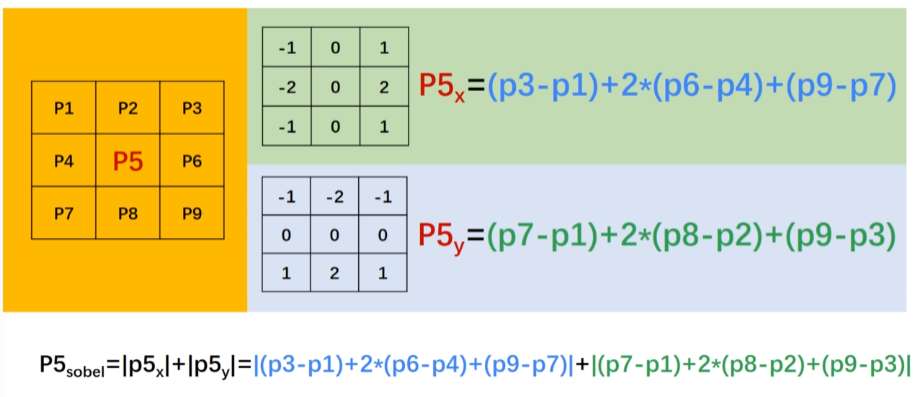
G =\sqrt{(G_x)^2 + (G_y)^2}简化版本:
G =|G_x| + |G_y|
2.Sobel算子的函数及应用
#img2 = cv2.Sobel(img1, ddepth, dx, dy, [ksize])
#ddepth:处理结果图像深度,通常为-1,让处理结果与原图像始终保持一致
#dx:x轴方向,计算x方向梯度:[dx = 1, dy = 0]
#dy:y轴方向,计算y方向梯度:[dx = 0, dy = 1]
#ksize:核大小,设置为奇数。默认为3
#计算sobel方式1:dx = 1, dy = 1 (不严谨不推荐)
img2 = cv2.Sobel(img1, -1, 1, 1)
#计算sobel方式2:分别计算dx和dy后相加
dx = cv2.Sobel(img1, ddepth, 1, 0)
dy = cv2.Sobel(img1, ddepth, 0, 1)
#img2 = dx*系数1 + dy*系数2 #乘以系数主要是防止溢出,一般系数为0.5
#img2 = cv2.addWeighted(dx, alpha, dy, beta, gamma)
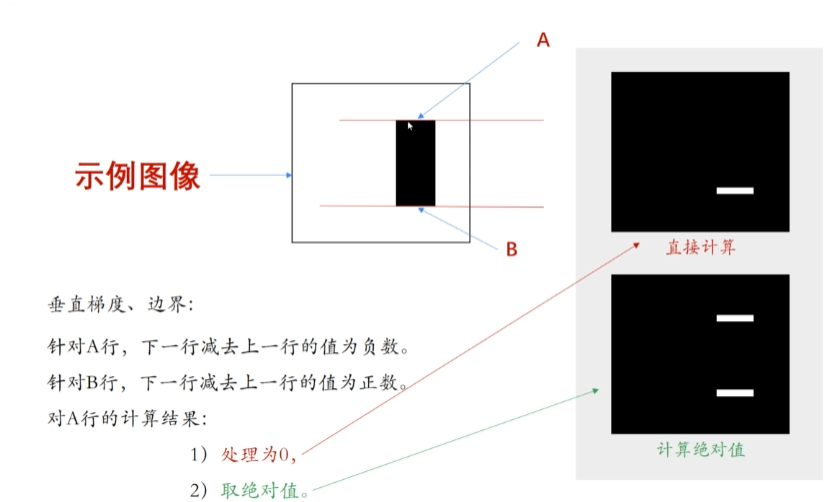
img2 = cv2.addWeighted(dx, 0.5, dy, 0.5, 0)上述代码有一个问题,即只会抓取右边界和下边界。左上边界因为负数原因没有被成功抓取。所以,在计算时,使用更高的数据类型cv2.CV_64F,取绝对值后再转换成np.unit8(cv2.CV_8U)。所以深度ddepth不写-1,改cv2.CV_64F。整体流程如下:
#第一步,使用更高数据类型
sobelx = cv2.Sobel(img1, cv2.CV_64F, 1, 0)
sobely = cv2.Sobel(img1, cv2.CV_64F, 0, 1)
#第二步,取绝对值,并将梯度图像转换成256色位图,转换为unit8类型
#img2 = cv2.convertScaleAbs(img1, [, alpha[, beta]])
#目标图像 = 调整(原始图像 * aplha + beta)
#或者
#img2 = cv2.convertScaleAbs(img1)
sobelx= cv2.convertScaleAbs(sobelx)
sobely= cv2.convertScaleAbs(sobely)
#第三步,相加x和y的梯度
img2 = cv2.addWeighted(sobelx, 0.5, sobely, 0.5, 0)3.Scharr算子的函数及其应用
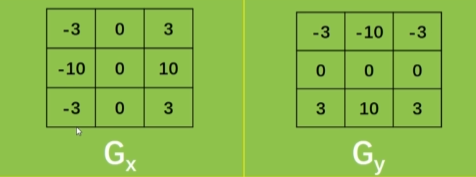
类似sobel算子,但是系数不一样。
#img2 = Scharr(img1, ddpeth, dx, dy)
#第一步,使用更高数据类型
scharrx = cv2.Scharr(img1, cv2.CV_64F, 1, 0)
scharry = cv2.Scharr(img1, cv2.CV_64F, 0, 1)
#第二步,取绝对值,并将梯度图像转换成256色位图,转换为unit8类型
#img2 = cv2.convertScaleAbs(img1, [, alpha[, beta]])
#目标图像 = 调整(原始图像 * aplha + beta)
#或者
#img2 = cv2.convertScaleAbs(img1)
scharrx = cv2.convertScaleAbs(scharrx)
scharry = cv2.convertScaleAbs(scharry)
#第三步,相加x和y的梯度
img2 = cv2.addWeighted(scharrx, 0.5, scharry, 0.5, 0)Sobel对大的色差比较敏感,Scharr对于小的差值也能很好的反映出来。
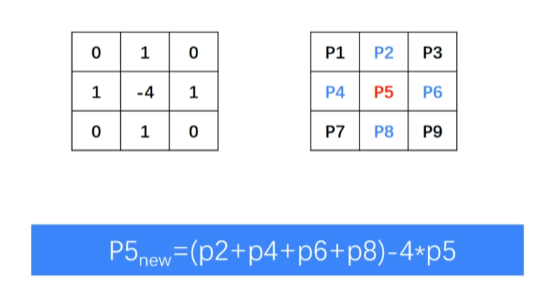
4.Laplacian函数及其使用
图像处理经常把Laplace算子作为边缘检测之一,也是工程数学中常用的一种积分变换。拉普拉斯算子(Laplace Operator)是n维欧几里得空间中的一个二阶微分算子,定义为梯度(∇f)的散度(∇⋅)。
\Delta f = \nabla^2f = \nabla \cdot \nabla f= div(gradf)
在笛卡尔坐标系下,拉普拉斯算子可以被表示为:
\Delta f = \frac{\partial^2f}{\partial x^2} + \frac{\partial^2f}{\partial y^2} + \frac{\partial^2f}{\partial z^2}推广到n维空间中的形式为:
\Delta = \sum \limits_{i} \frac{\partial^2f}{\partial x^2_i}现在用散度的概念解读一下:
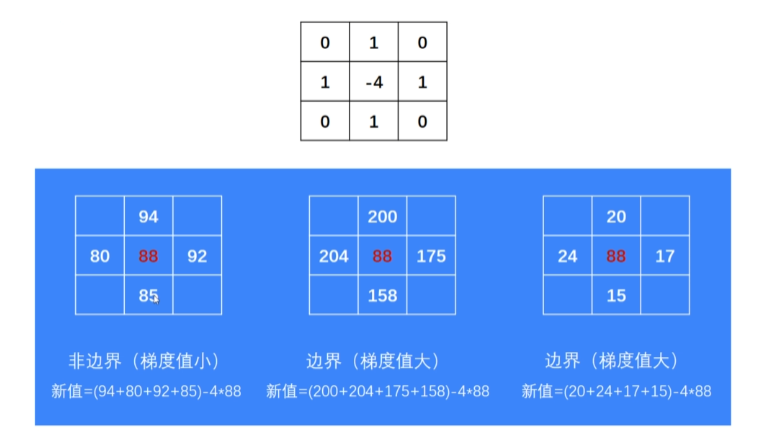
- 如果 Δf=0Δf=0 ,可以近似认为中心点 f(x,y)f(x,y) 的势和其周围点的势是相等的, f(x,y)f(x,y)局部范围内不存在势差。所以该点无源。
- Δf>0Δf>0 ,可以近似认为中心点 f(x,y)f(x,y) 的势低于周围点,可以想象成中心点如恒星一样发出能量,补给周围的点,所以该点是正源
- Δf<0Δf<0 ,可以近似认为中心点 f(x,y)f(x,y) 的势高于周围点,可以想象成中心点如吸引子一样在吸收能量,所以该点是负源
OpenCV中的Laplacian函数:
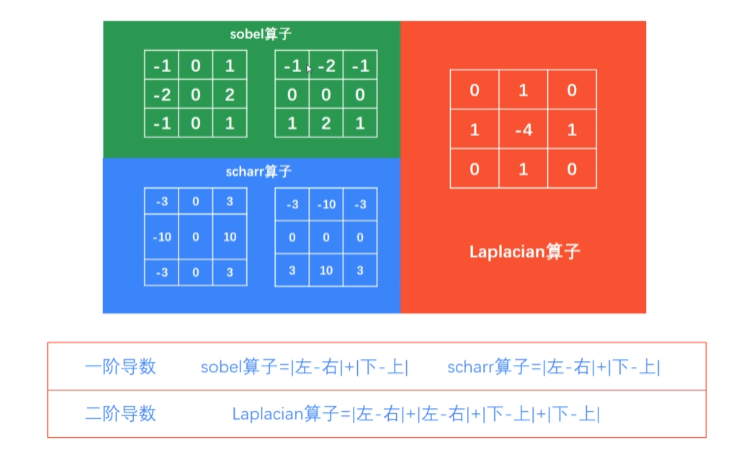
对比sobel算子和scharr算子:
#img2 = cv2.Laplacian(img1, ddepth)
#第一步,使用更高数据类型
laplacian= cv2.Laplacian(img1, cv2.CV_64F)
#第二步,取绝对值,并将梯度图像转换成256色位图,转换为unit8类型
img2= cv2.convertScaleAbs(laplacian)5.Canny边缘检测原理
Canny边缘检测一般分为四步:
- 去噪:边缘检测容易受到噪声的影响,因此在检测前通常需要进行去噪。一般使用高斯滤波器去除噪声。
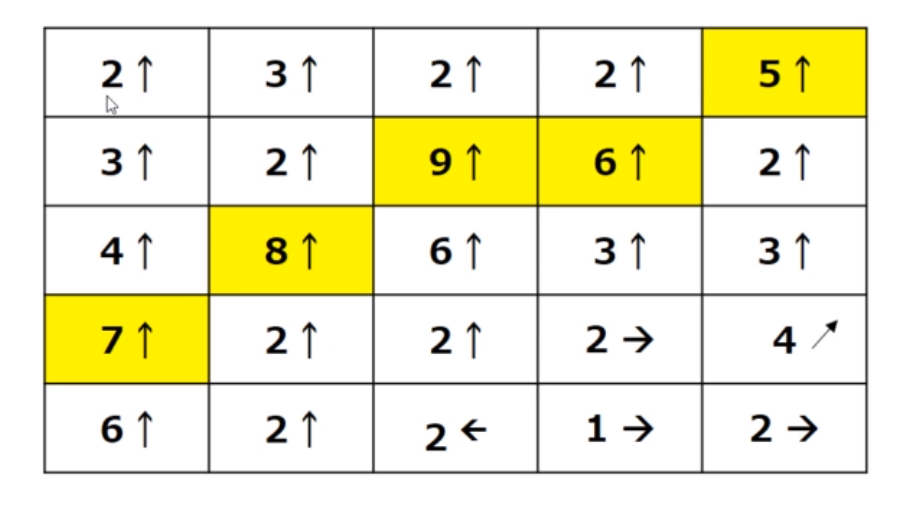
- 梯度:梯度方向一般总是与边界垂直。被归为四类:垂直,水平与两个对角线。用Angle(θ) = tan-1(Gy/Gx)获得。
- 非极大值抑制:遍历像素点,判断当前像素点是否是周围像素点中具有相同方向梯度的最大值。
- 滞后阈值。详见后文。
非极大值抑制:点A,B,C具有相同方向,梯度方向垂直于边缘。判断点A是否为点A,B,C的局部最大值。如果是,则保留该点,否则它被抑制(清零)。
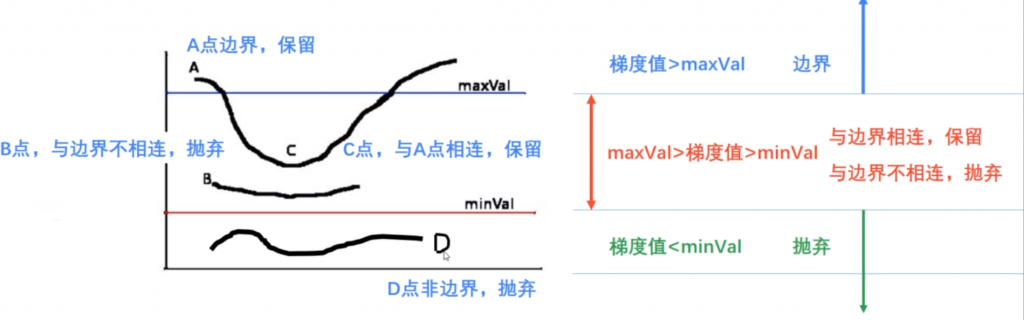
滞后阈值:小于给定最小阈值的边界值抛弃,大于最大阈值的边界值判定为边界。在最大最小阈值之间的,若与大于最大阈值的边界相连则判定为边界;反之则抛弃。
6.Canny函数及其使用
#img2 = cv2.Canny(img1, 阈值1, 阈值2)
#阈值1:minVal, 阈值2:maxVal
#阈值越小,边界信息越丰富,细节越多。
img2 = cv2.Canny(img1, 100, 200)
文章评论