

OpenCV学习笔记(3)——图像平滑处理
- 蒙面西红柿
- 2,484
图像滤波,即在尽量保留图像细节特征的条件下对噪声进行抑制,通过抑制高频段来减少噪音,同时会照成图像一定程度上的模糊,这也叫做平滑或者低通滤波器。
滤波本来应该是在傅立叶变换的频谱上对图像进行处理。但由于傅立叶的卷积特性
F[g*h]=F[g]F[h]
滤波后的图像可以由原图像和滤波算子做卷积生成(频域的乘积 => 空域的卷积)
g*h=F^{-1}[F[g]F[h]]更多有关傅里叶变换,参考如下视频:
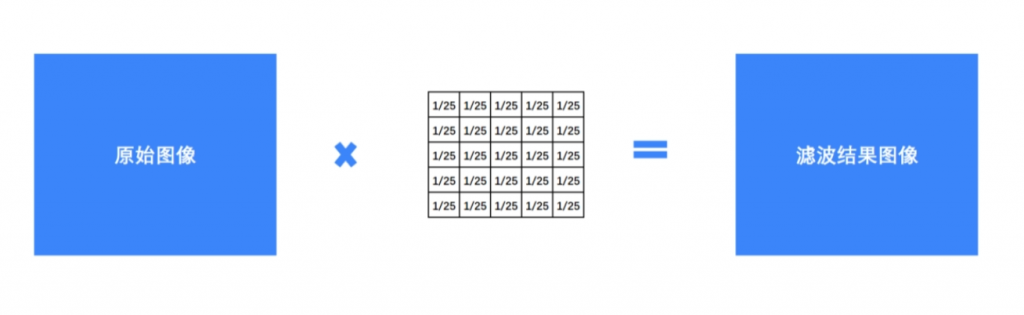
1.均值滤波
任意一点的像素值,都是周围N*N个像素值的均值。
下图是一个5*5的均值滤波核:
#处理结果 = cv2.blur(原始图像,核大小)
#核大小:以(宽度,高度)形式表示的元组
#因为会模糊,所以可以去除噪点
img2 = cv2.blur(img1, (5, 5))缺陷:均值滤波本身存在着固有的缺陷,即它不能很好地保护图像细节,在图像去噪的同时也破坏了图像的细节部分,从而使图像变得模糊,不能很好地去除噪声点。特别是椒盐噪声
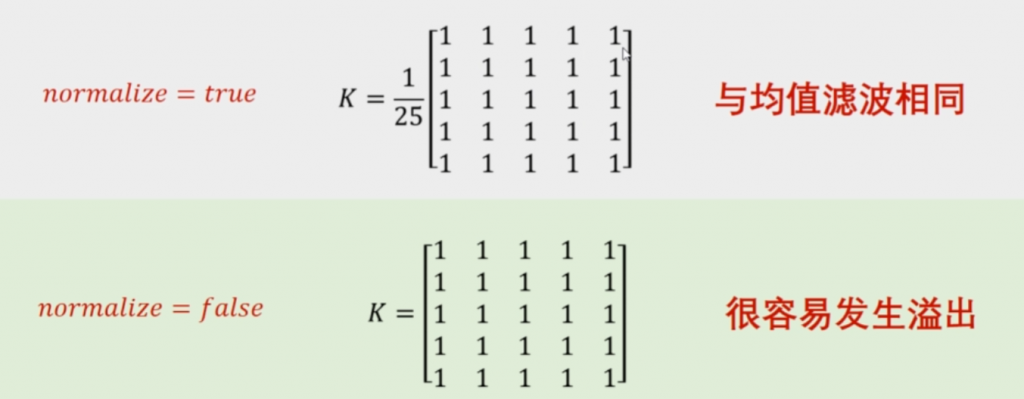
2.方框滤波
与均值滤波的主要区别是多了一个归一化处理。若归一化则与均值滤波一样。
#处理结果 = cv2.boxFilter(原始图像, 目标图像深度,核大小, normalize属性)
#目标图像深度: int类型的目标图像深度,通常用-1表示与原始图像一致。
#normalize属性:是否对目标图像进行归一化处理。
img2 = cv2.boxFilter(img1, -1, (5, 5), normalize = 1) #归一化处理,与均值滤波相同,若省略则默认为1(true)3.高斯滤波
让邻近的像素具有更高的重要度。对周围的像素计算加权平均值,较近的像素具有较大的权重值。
既然名称为高斯滤波器,那么其和高斯分布(正态分布)是有一定的关系的。一个二维的高斯函数如下:
h(x,y) = e ^ {- \frac{x^2 + y^2}{2\sigma ^ 2}}其中(x,y)(x,y)为点坐标,在图像处理中可认为是整数;σ是标准差。要想得到一个高斯滤波器的模板,可以对高斯函数进行离散化,得到的高斯函数值作为模板的系数。例如:要产生一个3×3的高斯滤波器模板,以模板的中心位置为坐标原点进行取样。模板在各个位置的坐标,如下所示(x轴水平向右,y轴竖直向下)

这样,将各个位置的坐标带入到高斯函数中,得到的值就是模板的系数。
对于窗口模板的大小为 (2k+1)×(2k+1),模板中各个元素值的计算公式如下:
H_{i,j} = \frac{1}{2\pi \sigma ^ 2}e ^{-\frac{(i - k - 1)^2 + (j - k - 1)^2}{2 \sigma ^ 2}}这样计算出来的模板有两种形式:小数和整数。
- 小数形式的模板,就是直接计算得到的值,没有经过任何的处理;
- 整数形式的,则需要进行归一化处理,将模板左上角的值归一化为1,下面会具体介绍。使用整数的模板时,需要在模板的前面加一个系数,系数为模板系数和的倒数
\frac{1}{\sum\limits_{(i,j)\in w}w_{i,j}}更多原理,参考https://www.cnblogs.com/wangguchangqing/p/6407717.html
#img2 = cv2.GaussianBlur(img1, ksize, sigmaX)
#ksize: 核大小(N, N) 必须是奇数
#sigmaX: X方向方差,控制权重
#sigmaX = 0时: sigma = 0.3 * ((ksize-1) * 0.5 - 1) + 0.8
img2 = cv2.GaussianBlur(img1, (3, 3), 0)4.中值滤波
让临近的像素按照大小排列,去排序像素集中位于中间位置的值作为中值滤波后的像素值。对于椒盐图的处理,中值滤波的效果最好。
#img2 = cv2.medianBlur(img1, ksize)
#ksize:核大小,必须是比1大的奇数,如3,5,7等
img2 = cv2.medianBlur(img1, 3)
文章评论